
皆さんこんにちは。yossyです。
「せっかく電子工作をするなら、もっとワクワクするものを作りたい!」
そう思ったことはありませんか?
私もそんなふうに思っていたところ、ちょうど面白い自作ラジコンの企画を発見しました!
今回は、自作ラジコン用にオリジナル基板を作ってみたいと思います!
ラジコンを作ろう
 yossy
yossy今回から、ラジコンの自作に挑戦してみます!
(多分長くなるので、今回は基板製作編です。)
アズパカさんの「魔自ラジ」企画
今回自作ラジコンを作ろうと思ったきっかけは、Youtubeやニコニコ動画で有名なホビー系投稿者のアズパカさんが企画した、「魔自ラジ」という企画です。
この企画は、魔改造自作ラジコンレースのことで、タミヤの工作キットやモーターをベースに、自作ラジコンを作ってレースをしようという企画です。
テーマは「魅せろ」
普通のラジコンとは違って、既製品をただ走らせるのではなく、自分でパーツを作ったり、機構をいじったりして「自分だけのラジコン」を作って楽しむイベントです。個性的なアイデアがどんどん出てくるのが魅力です。
実際に参加している人たちの作品を見ていると、水陸両用だったり、特殊機構満載だったりと本当に面白いマシンがたくさんあります。
yossy個人的にはこの差動ステアリング搭載ラジコンが好きです。
どんなラジコンを作ろう?
普通のラジコンは「速さ」や「コントロールのうまさ」を競うイメージですよね。
でも正直な話、私は高度な工作技術や操縦テクニックは全然持っていません。
そこで思いついたのが、自作基板を使った「探査機ラジコン」の自作です。
よくあるラジコン用キットは、走らせることに特化しているためあまり拡張性が高くないです。
自分としてはセンサーなどを接続して色んな機能を試せるようにしたいと考えています。
なので、いろんなパーツを繋げられるような基板を自作して、オリジナルの機能を追加することができるラジコンを作ろうと思います。
ラジコンの構成
yossy早速ラジコンの構成を考えてみました。
マイコン
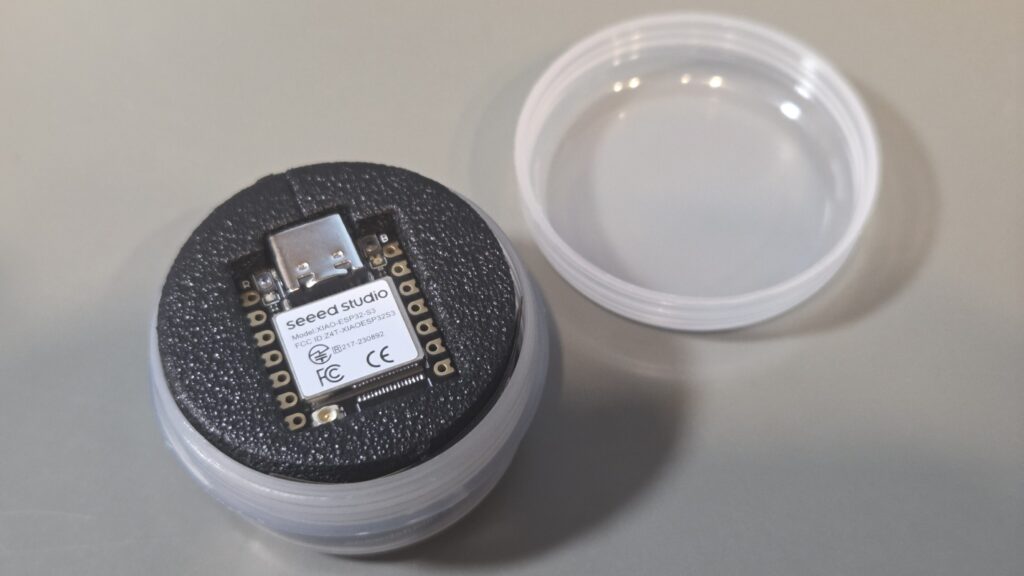
最初はラズピコ系を使おうと思っていましたが、省スペースで無線機能が使えるXIAO ESP32 C3を使います。
このシリーズのマイコンボードは親指サイズととても小さいです。
モーター系
駆動用モーターは最大4つまでですが、最低2つあれば左右の回転数の差でステアリングできるので、まずは2つ載せられるようにします。
サーボモーターも2つ載るようにします。ステアリング用に使っても最低1つは余るので、距離センサをつけてレーダーや障害物回避に使えそうです。
モータードライバはAM2837を使います。1つ100円ですが、連続で3Aの電流を流せます。
ミニ四駆用のモーターは、トルクチューンモーターで1.7~2.0Aと結構大きめの電流が流れるのでこれにしました。
yossy1モーター用なので2つ使います!
センサー・拡張
センサーはGroveという規格で接続できるようにします。I2Cを2ポート(1系統)、UARTも1ポート搭載します。
UARTがあればGPSセンサも載せられるので、より探査機っぽくなりますね。
あとは、機体の動きを見ることができるように9軸センサであるBNO055を載せます。

ベース機体
一から機体を作るのは難しいので、タミヤの工作キットを使おうと思います。
候補としては探査機なので、クローラー系か巷で話題のローリングロボットをベースにしようと思います。

ローリングロボットはこちらです。個人的にすごく馴染みのある見た目。

基板を作ろう
ある程度構成が決まったので、さっそく基板を作っていきましょう。
まずはKiCADを使って、回路図と基板のデザインを作ります。
メインとなるマイコン周辺とモータードライバの回路をお見せします。
マイコン周辺
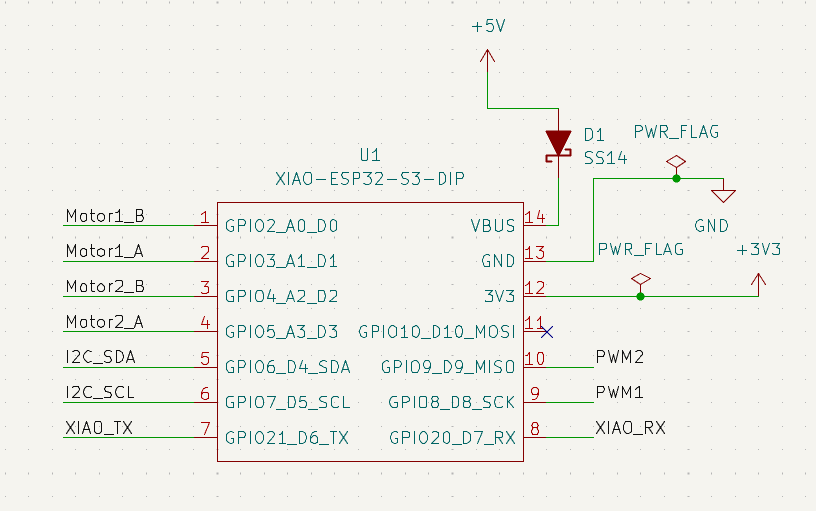
とりあえずピン配置はこんな感じです。
電源はUSBの5Vがバッテリー側からの供給に流れていかないように、ダイオードを入れています。
11番ピンもNeoPixel用に使いたかったのですが、スペースの関係で省略しました。
モータードライバ
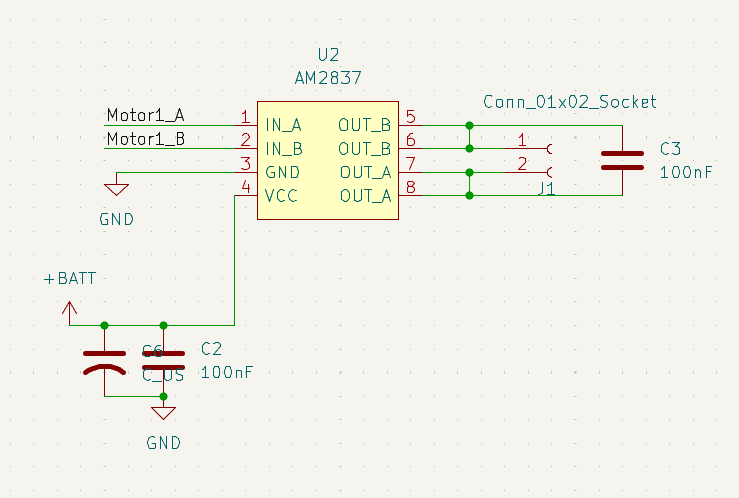
モーターを回すために大事なモータードライバの回路です。
これはデータシートにあるサンプル回路そのままです。最初電解コンデンサが入らずに省略しようかと思いましたが、ちょっと不安になったので基板のサイズを大きくして入れました。(書いてあるということは入れたほうがいい。)
C3は必須と書いてあったので絶対に入れましょう。モーターのノイズ対策用です。
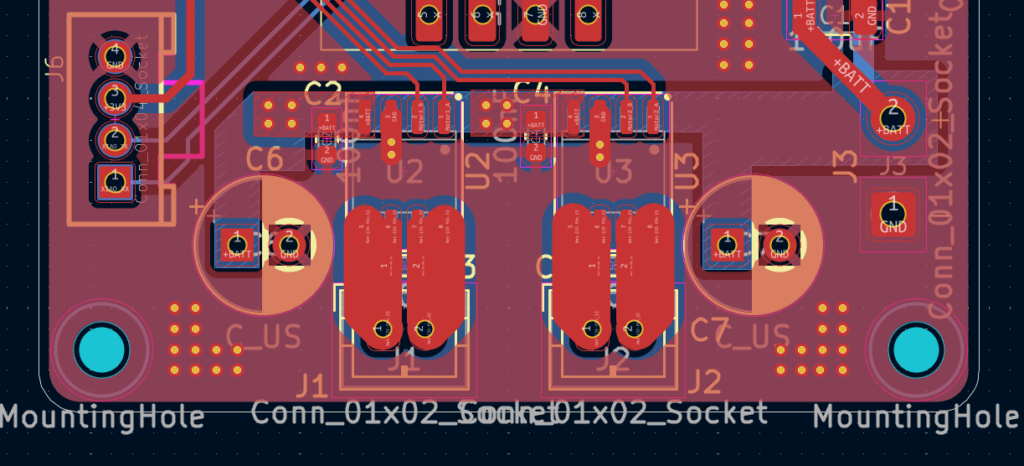
PCBエディタでこの部分を見るとこんな感じです。モーターには大きな電流が流れるので、「太く・短く」を意識して配線しました。
実は、このデザインが完成する前にモータードライバのフットプリントを間違えていたため、データを作り直しすることになりました💧
yossyフットプリントの間違いはどうにもならないので、
発注する前にはしっかりと確認しましょう!
基板データ完成!
完成した基板のイメージはこちら。
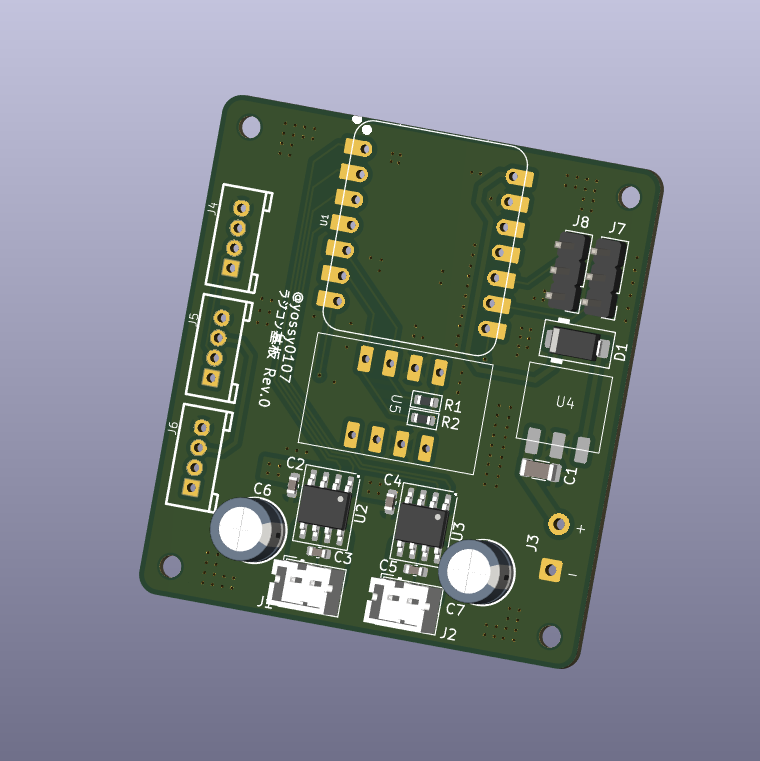
サイズは50mm×45mmです。いろんな場所で使えるようにできるだけ小さくしています。
基板&ステンシル発注
早速発注していきます。
今回もJLCPCBさんのご提供で基板を作っていただけることになりました。
yossyいつもありがとうございます!
JLCPCBでは、新規登録者に向けてクーポンを配布しているので、基板を作るならぜひ登録しましょう!
新規ユーザーの方は$70クーポンが貰えます!いますぐリンクに飛んで取得しよう! #JLCPCB
今回発注する基板には表面実装部品がありますが、リフロープレートを手に入れたので今回は自分ではんだ付けをやってみたいと思います!
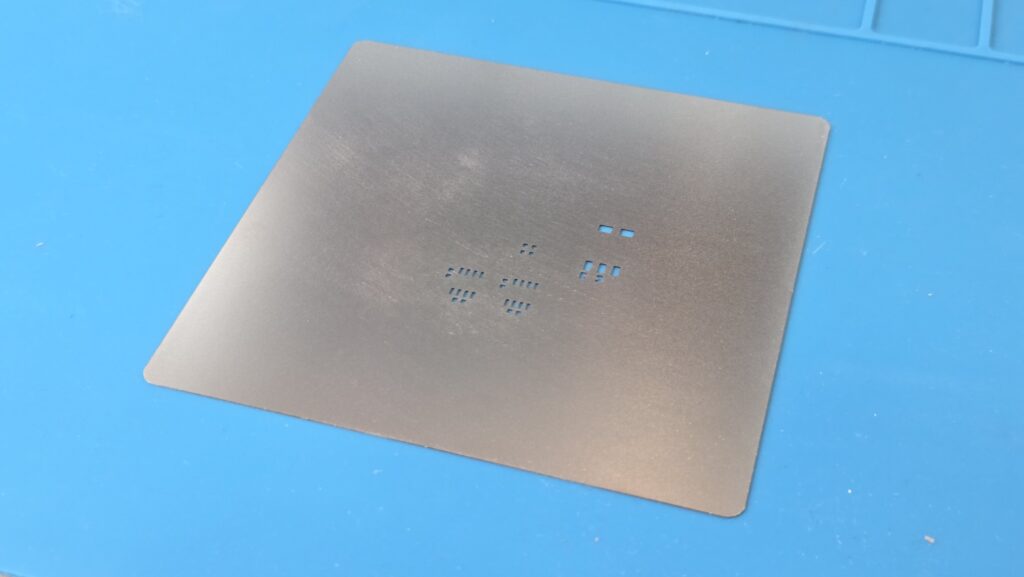
自分で表面実装するときに絶対あったほうがいいもの、それは「ステンシル(メタルマスク)」です。
ステンシルとは、表面実装部品のはんだ部分に穴が空いた型のことです。ステンシルを使ってペーストハンダを塗り拡げることで、適量のはんだを正しい位置に塗ることができます。
ステンシルの発注

ステンシルの発注はとても簡単です。
基板データをアップロードして、発注画面を下にスクロールするとステンシルを発注するオプションが選べます。
これを有効にして必要な設定をするだけです。
yossy基本的にデフォルト設定で大丈夫ですが、
変更したほうがいいのは「寸法」の項目です。
デフォルトではかなり大きめなサイズになっているので、自分で切るなどの加工が必要になることがあります。
今回の基板のサイズは50mm×45mmなので、100mm×100mmのステンシルにしました。
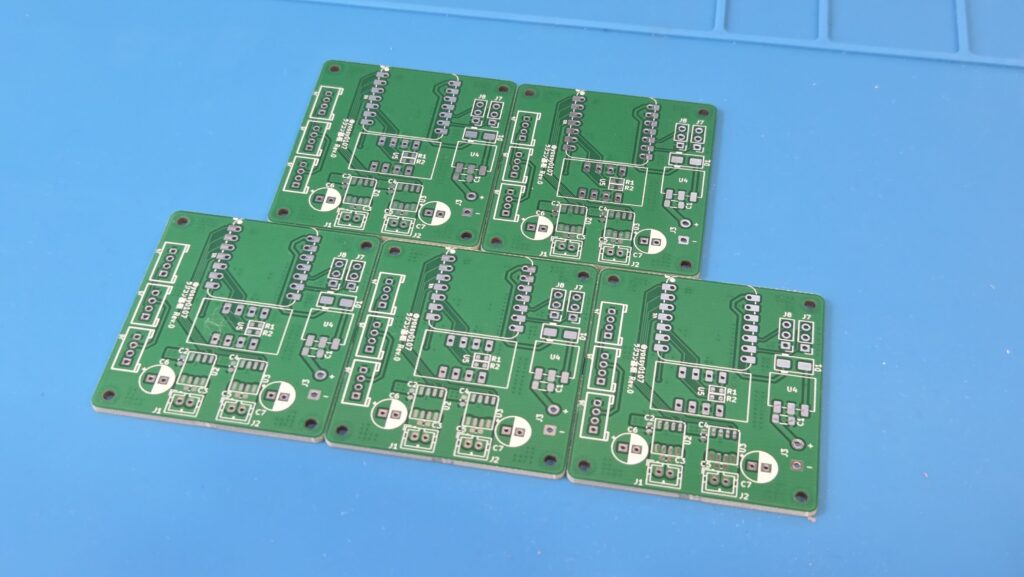
到着&組み立て
届いたので組み立てていきましょう。

中には基板と、一緒に発注したステンシルが入っています。
表面実装部品の取り付け
表面実装部品の取り付け方法です。
まずはこのように基板を使って基板を固定します。
ステンシルの穴ぴったりにパッドが来るように位置をあわせてください。
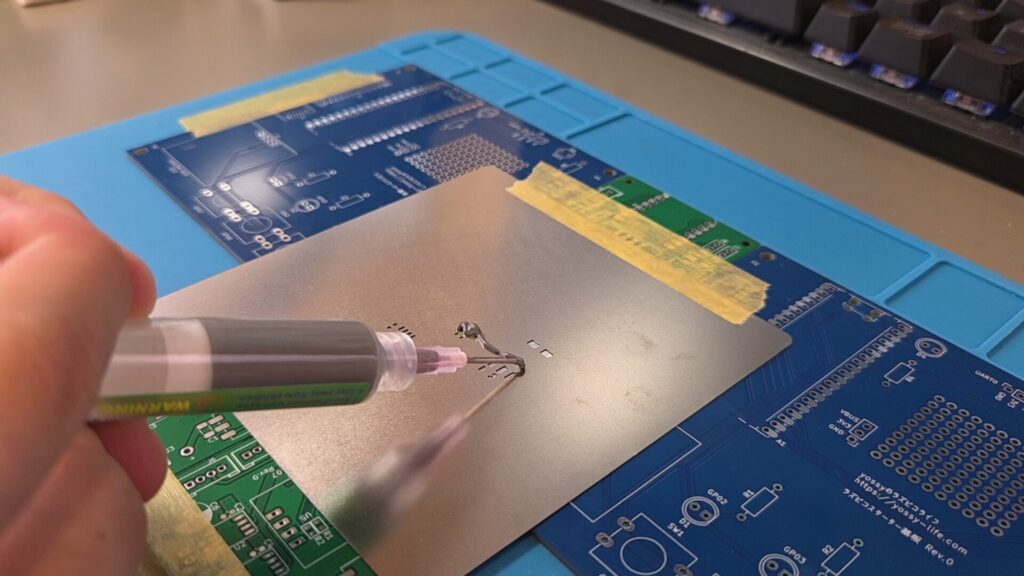
次にはんだペーストをステンシルの上に出します。
yossyはんだペーストは無鉛のものを使っています。
AliExpressで購入するのがおすすめです。
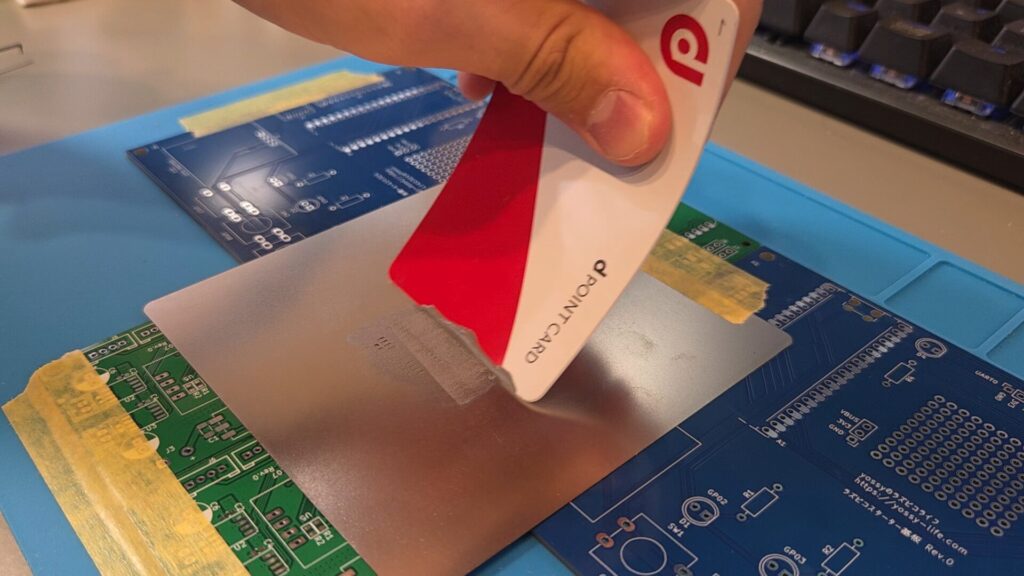
使わないポイントカードなどで塗り拡げましょう。
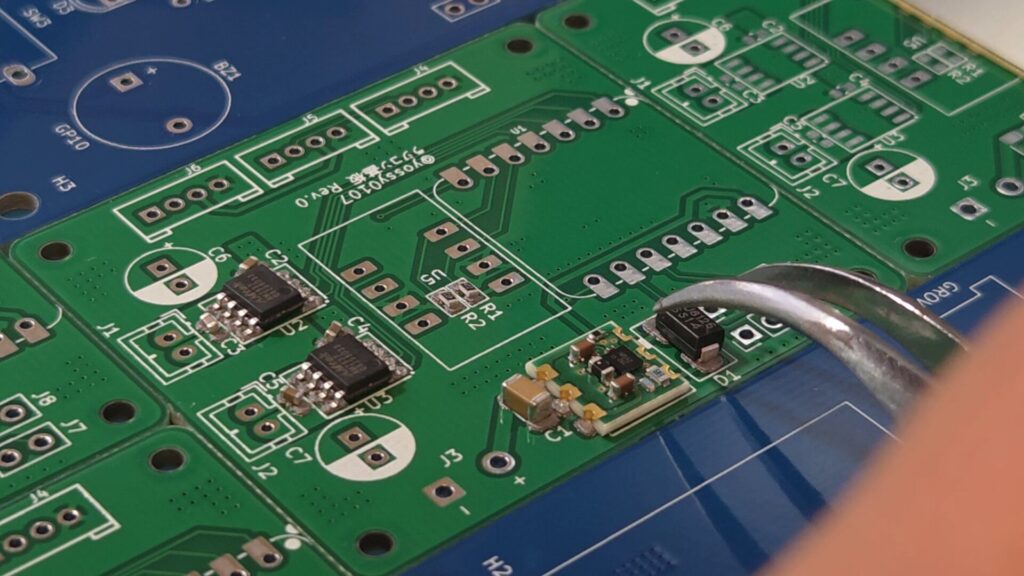
部品を置きます。とても小さいのでピンセットを使いましょう。少し部品がズレていても大丈夫です。はんだペーストが溶けると表面張力が働き、正しい位置に動きます。
yossyセルフアライメント効果という現象です!
これをリフロープレートに載せて加熱すると、このようにはんだ付けされます。
正しい位置に動いている様子が見てて楽しい。
完成!!!
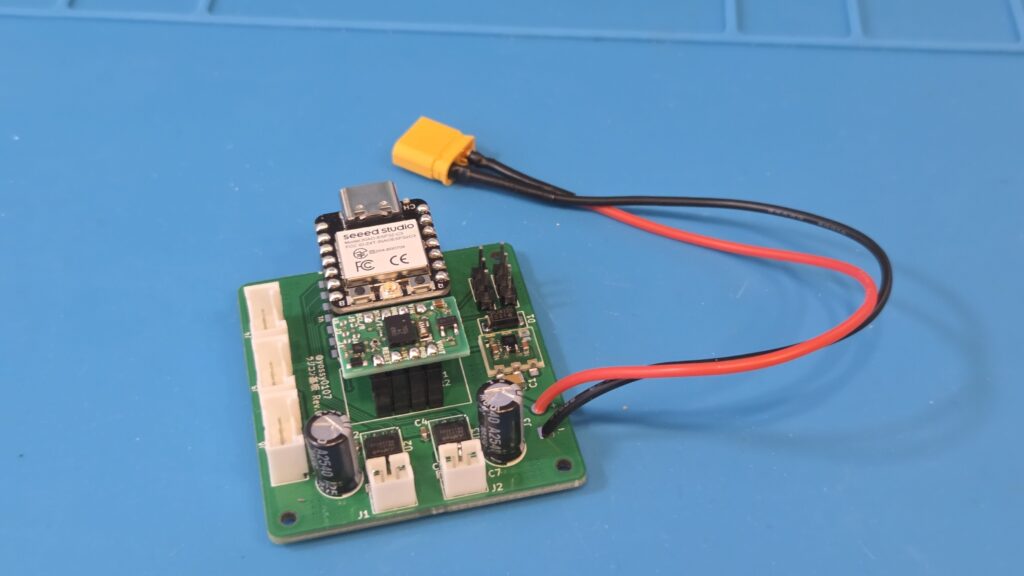
そしてスルーホール部品をはんだ付けすれば基板の完成です。結構パーツ同士の間隔が狭いのでぶつからないか心配でしたが案外ちょうどよく収まりました。
yossyそして思ったより小さい
電源ケーブルにはXT30コネクタを使いました。少しオーバースペックかな?とも思いましたが、逆接続が防止されていてしっかりつながるコネクタという印象で使いやすいです。これからも使っていこうと思います。
動かしてみた
ということで、完成した基板を動かしてみましょう。
Arduino IDEを使って、電源が入るとモーターが回るプログラムを書き込んであります。
yossyちゃんと回りました!
こういったモーターを回すような回路を作ったのは初めてなので動作して一安心です。
まとめ
今回は、自作ラジコン用にオリジナルのラジコン基板を作りました!
初めてのステンシル注文&リフローでしたが、とても簡単に組立てることができたので、これからもっと活用していきたいですね。皆さんもJLCPCBでステンシルの発注を試してみてください!
そして、次は機体の製作です。現在どんなマシンにしようか色々考えています…
yossyということで、次回の製作編もお楽しみに!

コメント